
1. SMPS 용량을 확인 하세요.
- 다축 구동 시 순간적으로 많은 전류를 소비하면서 SMPS에 전압강하가 발생하여, 순간적으로 24V전원이 정상적으로 공급하지 않아 Alarm이 발생합니다.
- SMPS 용량을 높여주세요.
2. A/S를 요청하세요.
Load More
1.Gantry 설정 방법
예제 1)
Master Motor : #1
Slave Motor : #2
↓
Motor[2].CmdMotor=1
Motor[2].ServoCtrl=8
예제2)
Master Motor : #3
Slave Motor : #4
↓
Motor[4].CmdMotor=3
Motor[4].ServoCtrl=8
2.안전을 위한 Gantry 추가 설정
1) Gantry 구동 중 Master or Slave Motor의 Amp Fault 혹은 F.E로 인하여 모터가 Kill 되는 경우에는 Motor[x].FaultMode를
설정하여 자동으로 모터를 Kill 할 수 잇습니다.
Motor[1].FaultMode=1
Motor[2].FaultMode=1 (Master & Salve 모두 설정)
위 설정은 반드시 두 모터가 동일한 좌표계에 할당되어 있어야 합니다.
2) 사용자에 의해 Master Motor가 Kill 되는 경우 Slave Motor가 상황에 따라 움직이는 경우가 발생 할 수 있습니다.
이는 아래와 같은 설정으로 막을 수 있습니다.
Motor[2].pAuxFault=Motor[1].pAmpEnable
Motor[2].AuxFault=Motor[1].AmpEnableBit
Motor[2].AuxFaultLevel=0
Slave의 AuxFault를 Master의 AmpEnable상태에 따라가도록 설정 한 것입니다.
이렇게 설정 할 경우 반드시 Master가 Servo On되어야 Slave가 Servo On 될 수 있습니다.
축 카드없이 CPU만으로 Servo Interrupt를 생성시켜 구동 테스트가 가능합니다.
Sys.CPUTimerIntr=1
Sys.ServoPeriod=0.5
//// #1
Motor[1].Ctrl=Sys.PidCtrl // Only need simple PID loop
Motor[1].ServoCtrl=1
Motor[1].PhaseCtrl=0
Motor[1].pDac=Sys.Idata[1].a
Motor[1].pAmpEnable=0
Motor[1].pAmpFault=0
Motor[1].pLimits=0
Motor[1].CaptureMode=1 // Software capture
//// Needed gains
Motor[1].Servo.Kp=1
Motor[1].Servo.Kvfb=0
Motor[1].Servo.Kvff=0
Motor[1].Servo.Kaff=0
Motor[1].Servo.Ki=0
//// Process Dac date
EncTable[1].type=1
EncTable[1].ScaleFactor=1/65536
EncTable[1].pEnc=Sys.Idate[1].a
EncTable[1].index4=1
Power PMAC 전용 Servo IC인 ACC-24E3 보드에서 Pulse and Direction 사용을 위한 자료입니다.
출력은 Encoder 입력 단에서 나가게 되어있습니다.
ACI 옵션(65536 체배)에서는 사용이 불가능합니다.
Sys.Wpkey=$AAAAAAAA
Gate3[0].PfmClockDiv=5
Gate3[0].Chan[0].OutputMode=8
Gate3[0].Chan[0].EncCtrl=8
Gate3[0].Chan[0].OutFlagD=1
Gate3[0].Chan[0].packoutdata=0
Gate3[0].Chan[0].packindata=0
Gate3[0].Chan[0].PfmWidth=5
EncTable[1].type=1;
EncTable[1].pEnc=Gate3[0].Chan[0].ServoCapt.a;
EncTable[1].pEnc1=Sys.pushm;
EncTable[1].index1=0
EncTable[1].index2=0
EncTable[1].index3=0
EncTable[1].index4=0
EncTable[1].ScaleFactor=1.0/256.0;
EncTable[1].MaxDelta=0
EncTable[1].SinBias=0
EncTable[1].CosBias=0
Motor[1].pDac=Gate3[0].Chan[0].Pfm.a
Motor[1].pEnc=EncTable[1].a
Motor[1].pEnc2=EncTable[1].a
Motor[1].pLimits=0
Motor[1].pAmpEnable=0
Motor[1].pAmpFault=0
Motor[1].Servo.Kvfb=0
Motor[1].Servo.Kp=40
Motor[1].Servo.Kvff=40
Motor[1].Servo.Ki=0.001
Motor[1].PhaseCtrl=0
Motor[1].Inpos=10
Motor[1].ServoCtrl=1
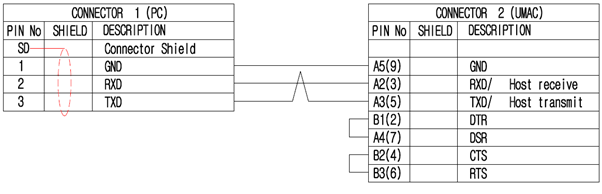
UMAC (26Pin) to PC (DSUB 9Pin) 시리얼 통신용 케이블 핀맵
먼저, 보정테이블의 정의 방법입니다.
#{Motor번호} DEFINE COMP {엔트리개수}, [#{Source모터}[D], [#{Target모터},]] {Table범위}
위와 같이 보정테이블을 정의해서 사용 할 때,
Source 모터의 ixx08 설정 값을 default가 아닌 다른 값으로 설정한 후 백업을 받고
그 백업 파일을 다운로드하면 보정테이블의 Table 범위가 변경 됩니다.
** ixx08 변경 전에 모터는 Kill 상태이어야 합니다. **
예를 들어, 아래와 같은 내용을 다운로드 한 후
#1 DEFINE COMP 10, #1D, 10000
160, -80, -120, -96, -20, 56, 12, 32, 16, 0
i108 = 12
Pewin32Pro의 Terminal 창에서 #1 list comp def 명령으로 보정테이블 정의 내용을 확인하면,
10,#1D,#1,80000가 확인됩니다.
즉, Table 범위가 바뀌게 됩니다.
이러한 문제를 해결하기 위해서는 백업 받으신 파일에서 Source 모터의 ixx08 변수 설정 내용
보정테이블 위로 위치를 변경시켜서 다운로드해야 합니다.
ex)
i108 = 12
#1 DEFINE COMP 10, #1D, 10000
160, -80, -120, -96, -20, 56, 12, 32, 16, 0
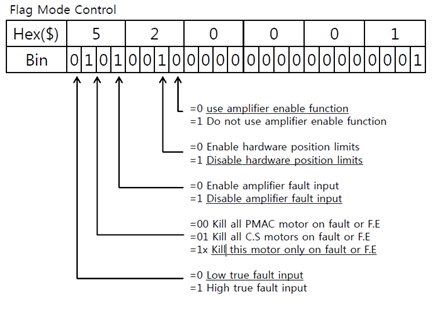
ixx24 : Flag Mode Control
해당 변수는 Hex값으로 사용자 사양에 맞게 다음과 같이 설정합니다.
m : Servo IC number (0,1,2,3……)
n : Servo IC 축번호(1,2,3,4)의 의미로 아래 예시를 참고바랍니다.
예시) i7mn6 (Servo IC (m) Channel (n) Output Mode Select)의 축별 변수 값
| 축번호 | UMAC | Clipper | CRUISER |
| 1 | i7216 | i7016 | i7216 |
| 2 | i7226 | i7026 | i7226 |
| 3 | i7236 | i7036 | i7236 |
| 4 | i7246 | i7046 | i7246 |
| 5 | i7316 | i7016 | i7316 |
| 6 | i7326 | i7026 | i7326 |
| 7 | i7336 | i7036 | i7336 |
| 8 | i7346 | i7046 | i7346 |
단, UMAC 이나 CRUISER에서 m (Servo IC Number)은 2부터 시작합니다.
Pewin32Pro 실행 시 EAccessViolation 에러 해결 방법입니다.
간혹, 일부 컴퓨터에서 EAccessViolation 에러가 발생되는 경우가 있는데 다음과 같이 설정하시면 해결 가능합니다.
1. Pewin32Pro_Default.INI 파일 삭제
해당 파일은
C:\Program Files (x86)\Delta Tau\PMAC Executive Pro Suite\Pewin32 Pro 또는
C:\Program Files\Delta Tau\PMAC Executive Pro Suite\Pewin32 Pro 경로에 있습니다.
2. Pwein32Pro 실행하여 메뉴에서 Setup > General Setup and Options 클릭
Default Device 탭에서 Select 버튼 클릭하여 ‘PMAC 00 – NA’ 라고 되어 있으면 장치를 등록해줍니다.
3. 등록 할 장치가 없더라도 Defult를 다음과 같이 등록 합니다.
1) Insert 버튼 클릭
2) New 버튼 클릭
3) Available PMAC Devices 화면의 콤보박스에서 PmacETH0 선택
4) IP Address란에 192.6.94.5 입력 후 OK 버튼 클릭
5) PMAC 00 – ETH0 – IP : xxx.xxx.xxx.xxx 선택하여 OK 버튼 클릭
6) General Setup and Options 화면에서 OK 버튼 클릭
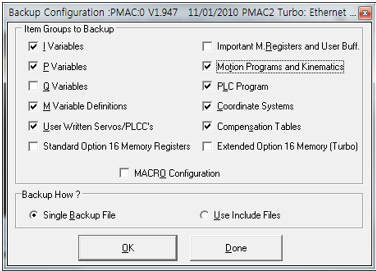
Backup (Pewin32Pro > Backup > Unload Configuration)에서 아래와 같이 저장할 아이템을 선택하고 OK를 누르시면
파일저장 위치 및 파일명을 입력하시면 해당 내용으로 Backup 파일을 생성합니다.
Restore (Pewin32Pro > Backup > Restore Configuration)을 선택하시면 Restore 할 파일을 입혁하면 해당 내용을 TurboPMAC2에
입력 됩니다. 터미널 창에서 Save를 하신 후 제어기를 재부팅 하시면 올바르게 적용 됩니다.
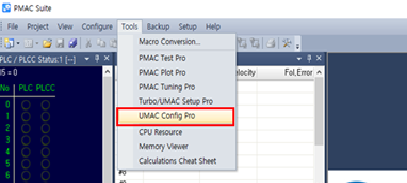
Pewin32 Pro / PMAC Suite에서 UMAC Config Pro를 선택합니다.
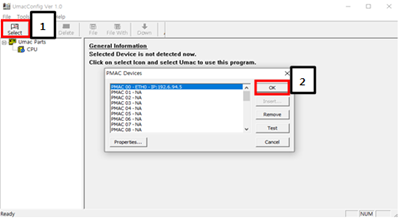
Ethernet 통신 접속하기
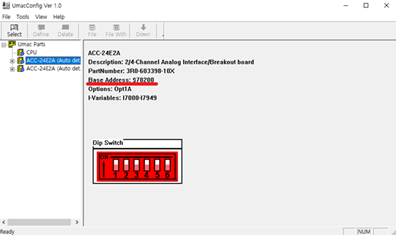
Address 및 DIP Switch 확인하기
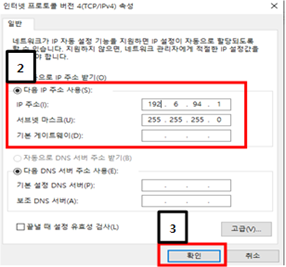
(1) PC 설정
제어판 > 네트워크 및 인터넷 > 네트워크 연결에서 제어기와 연결된 LAN포트 아이콘 마우스 우클릭 > 속성 선택

제어기의 기존 IP 주소가 192.6.94.5이므로 중복되지 않는 IP 주소를 입력한다.
(2) Pewin32 Pro / PMAC Suite에서 IP 설정 및 통신 테스트
IP등록 (초기 접속 시)

Pewin32 Pro > Setup > Force All Windows to Device Number를 선택하여 PMAC Devices에서 제어기의 기본 IP인 192.6.94.5를 등록한다.
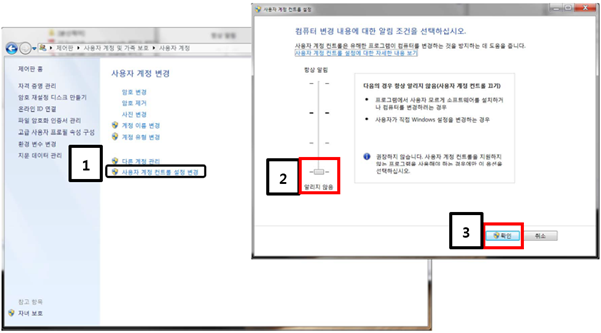
* Window7 에서는 사용자 계정 컨트롤 설정을 변경해야 한다.
(설정 확인 후 Windows 재부팅한 후 적용됨)
TurboPMAC2에서 D-PWM 제어시 모터 부하율을 구하고자 할 경우 다음 변수를 이용하여 계산을 통해 모니터링을 하시면 됩니다.
Ixx57 : #Motor xx Continuous current limit
Ixx69 : #Motor xx Output Command limit
Mxx75 : #Motor xx Actual quadrature current
Mxx75 는 실제 출력 값을 이며, Ixx69이상으로는 출력이 발생되지 않습니다.
그리고 Ixx57 는 I2T 설정에 의해 생성된 정격 전류 계산 값이라고 보시면 됩니다.
Mxx75 와 Ixx57의 값으로 부하율을 계산 하시면 됩니다.
부하율(%) = Mxx75/ Ixx57)*100
단, 셋업을 할때 모터의 I2T 관련 값이 잘못되었을 경우 계산된 부하율 또한 올바르지 않을 경우가 있습니다.
TurboPMAC2에서 토크 제어시 모터 부하율을 구하고자 할 경우 다음 변수를 이용하여 계산을 통해 모니터링을 하시면 됩니다.
Mxx68 : #Motor xx Filter Output (16-bit DAC bits)
Mxx68은 실제 출력 값과 관련된 16비트 변수로 -32768 ~ +32767 값을 가지며, 그 값은 Analog 전압 -10V ~ + 10V에 대응 합니다.
그래서 사용하시는 드라이버의 전압에 따른 정격토크값을 이용하시어 부하율을 계산하시면 됩니다.
예를 들면, G5 드라이버의 경우 Pn.319(Torque Command Scale)가 30일때 3V가 100% 토크이므로
부하율(%) = ((Mxx68/32767)*10[V]) / 3[V] * 100[%]
<주의> 사용하시는 드라이버에 따라 토크 100%에 대한 전압값들이 상이할 수 있습니다. 해당 드라이버의 메뉴얼을 참조 바랍니다.
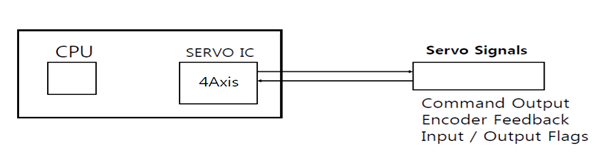
Servo IC는 PMAC CPU부와 외부 서보 신호의 중간에서 인터페이스 등 중요한 서보 기능을 수용하는 전용 CHIP입니다.
Servo IC는 Encoder Counter, Position Capture, Position Compare 기능 등 처리 속도에 민감한 기능들을 CPU의 관여 없이 독립적으로 수행합니다.
TCP/IP 통신을 위한 호스트 PC 주소를 192.6.94.5 (Turbo PMAC2 기본 IP)를 제외한 나머지로 설정을 합니다.